让 Agent 不会停下来:goal 命令
作者: | 更新日期:
第十五篇把整段会话搬到磁盘上做了持久化。但还有一件事让 Agent 始终像个"半成品"——它跑两步就停下来等你说"继续"。原因藏在 Loop 最底层那行判断:没有工具调用就退出。这篇聊聊 /goal 命令——给它一个完成条件,让它自己一轮一轮跑下去,跑到目标达成为止。
本文首发于公众号:天空的代码世界,微信号:tiankonguse
零、背景
前十五篇文章分别讲了 Agent 的 Loop、工具、上下文记忆、上下文压缩、MCP、Skill、TUI、任务规划、子代理、命令、跨会话记忆、Agent.md、系统提示词、任务持久化 和 会话持久化。
这篇聊聊一个让 Agent 「持续自己干活」的小命令——/goal。

一、Agent 为什么”干两步就停”
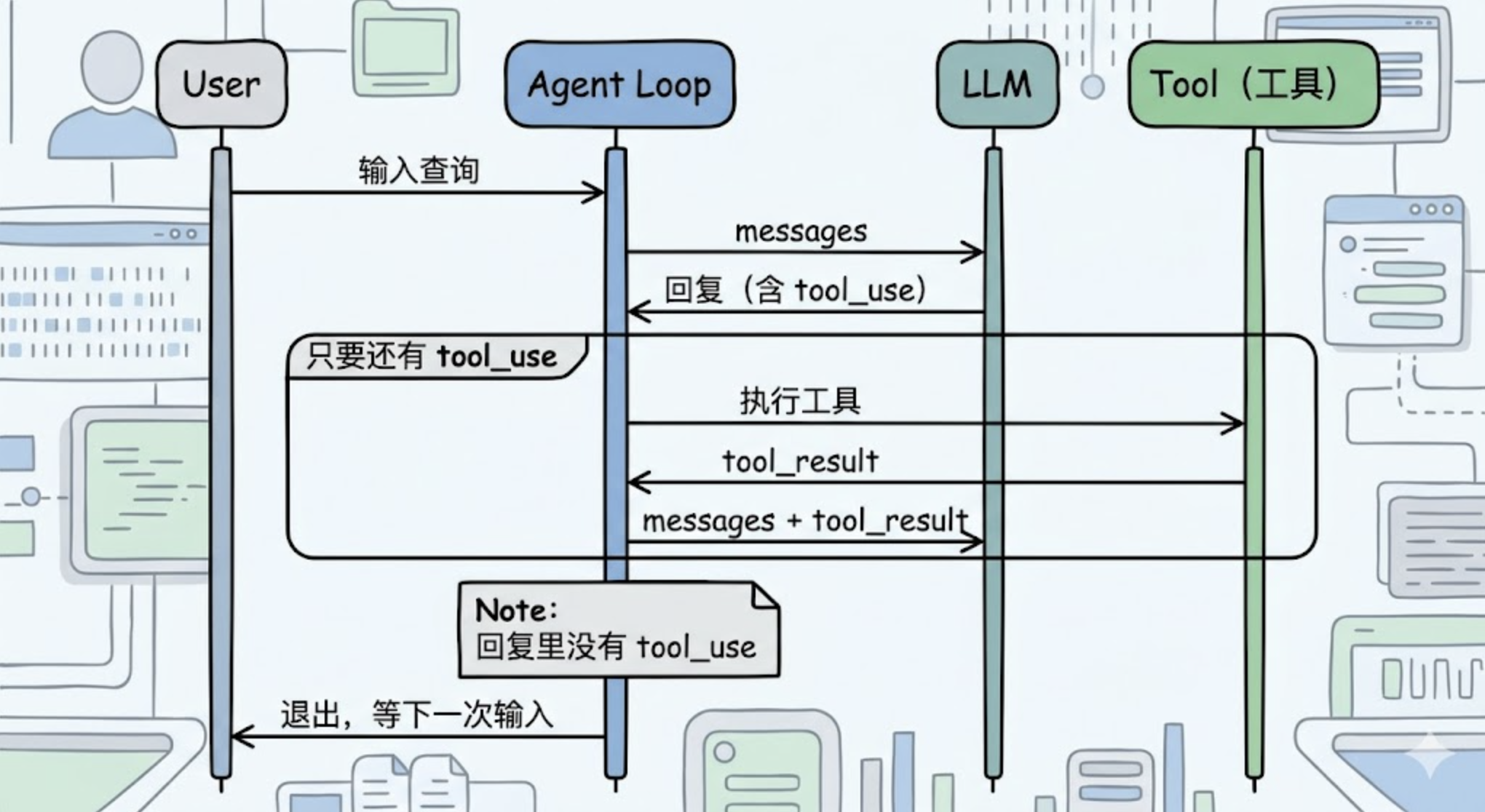
第一篇文章讲过,Agent 的 Loop 长这样:模型回一段话,看里面有没有 tool_use 块,有就执行工具,把结果塞回去再问下一轮;没有,循环结束。
sequenceDiagram
participant User
participant AgentLoop as Agent Loop
participant LLM
participant Tool as 工具
User->>AgentLoop: 输入查询
AgentLoop->>LLM: messages
LLM-->>AgentLoop: 回复(含 tool_use)
loop 只要还有 tool_use
AgentLoop->>Tool: 执行工具
Tool-->>AgentLoop: tool_result
AgentLoop->>LLM: messages + tool_result
LLM-->>AgentLoop: 下一轮回复
end
Note over AgentLoop: 回复里没有 tool_use
AgentLoop-->>User: 退出,等下一次输入
这套逻辑对”小问答”很合理——你问一句”列一下当前目录有啥”,Agent 调一次 bash、看一眼结果、回你一段总结,任务结束,控制权回到用户手上。
但碰到大任务就体验特别差了。
假设你说:”把 src/api/ 下所有 REST 调用迁移到 GraphQL,跑通所有测试”。Agent 改了两个文件、跑了一次测试、看到一堆失败、回你一段:”我修改了 user.go 和 auth.go,目前 4 个测试还在失败,需要继续修改吗?”——然后停下来等你回复。
你只能再敲一句”继续”。然后又是几步、又是问”还要继续吗”。
根因藏在 Loop 最底层的那行判断里:
// 简化伪代码
for {
resp := llm.Call(messages)
if !hasToolUse(resp) {
return // ← 这里就停了
}
runTools(resp)
}
只要 LLM 决定不调工具,仅仅返回文本时,Loop 就退出。
这个机制本身没错——它防止 Agent 陷入死循环、占着控制权不还。
但它也让”自主推进长任务”这件事变得不可能。
二、/goal 的核心思路
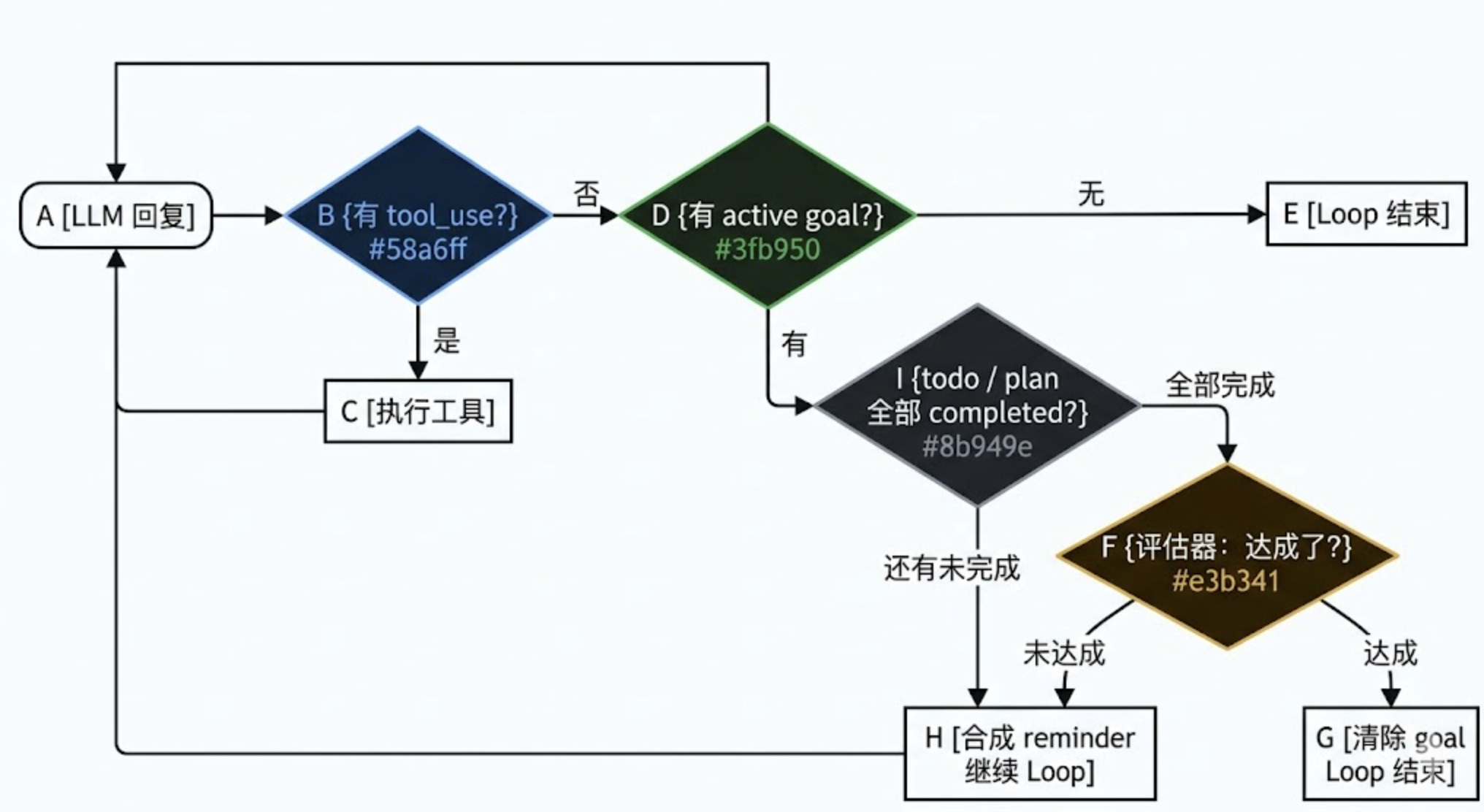
/goal 的解法非常直接——在 Loop 退出之前再加一个判断:用户的目标达成了吗?
判断本身分两段做。先扫一眼内存 todo 和磁盘 plan 里还有没有未完成项——只要还有,直接判定为没干完;只有结构化任务都已清零,才舍得调一次小模型读对话历史做语义判断。结构化校验 + 自然语言评估串联起来,才算真的完工。
把轻的检查放前面是有道理的——查内存切片和扫磁盘目录都是几微秒的事,调 LLM 评估器要花几百毫秒外加 token 钱。
如果任务列表里明摆着还有 in_progress,根本没必要再去问模型”做完了没”。
用便宜的判断挡掉大多数情况,把昂贵的判断留给最后一公里。
flowchart LR
A["LLM 回复"] --> B{"有 tool_use?"}
B -->|"是"| C["执行工具"]
C --> A
B -->|"否"| D{"有 active goal?"}
D -->|"无"| E["Loop 结束"]
D -->|"有"| I{"todo / plan\n全部 completed?"}
I -->|"还有未完成"| H["合成 reminder\n继续 Loop"]
I -->|"全部完成"| F{"评估器:达成了?"}
F -->|"未达成"| H
F -->|"达成"| G["清除 goal\nLoop 结束"]
H --> A
style B fill:#0d2137,color:#58a6ff
style D fill:#162118,color:#3fb950
style I fill:#1c2128,color:#8b949e
style F fill:#2d1b00,color:#e3b341
三、评估器:让小模型当裁判
真正有意思的是”判断目标是否达成”这一步。
最直接的做法是让正在干活的那个模型自己判断:”我做完了没?”——但这等于运动员自己当裁判。
模型有强烈的”完成欲”,会倾向把”差不多”说成”完成了”,把”测试还差几个”模糊成”主要测试都过了”。
让它自己评判自己的工作,可信度堪忧。
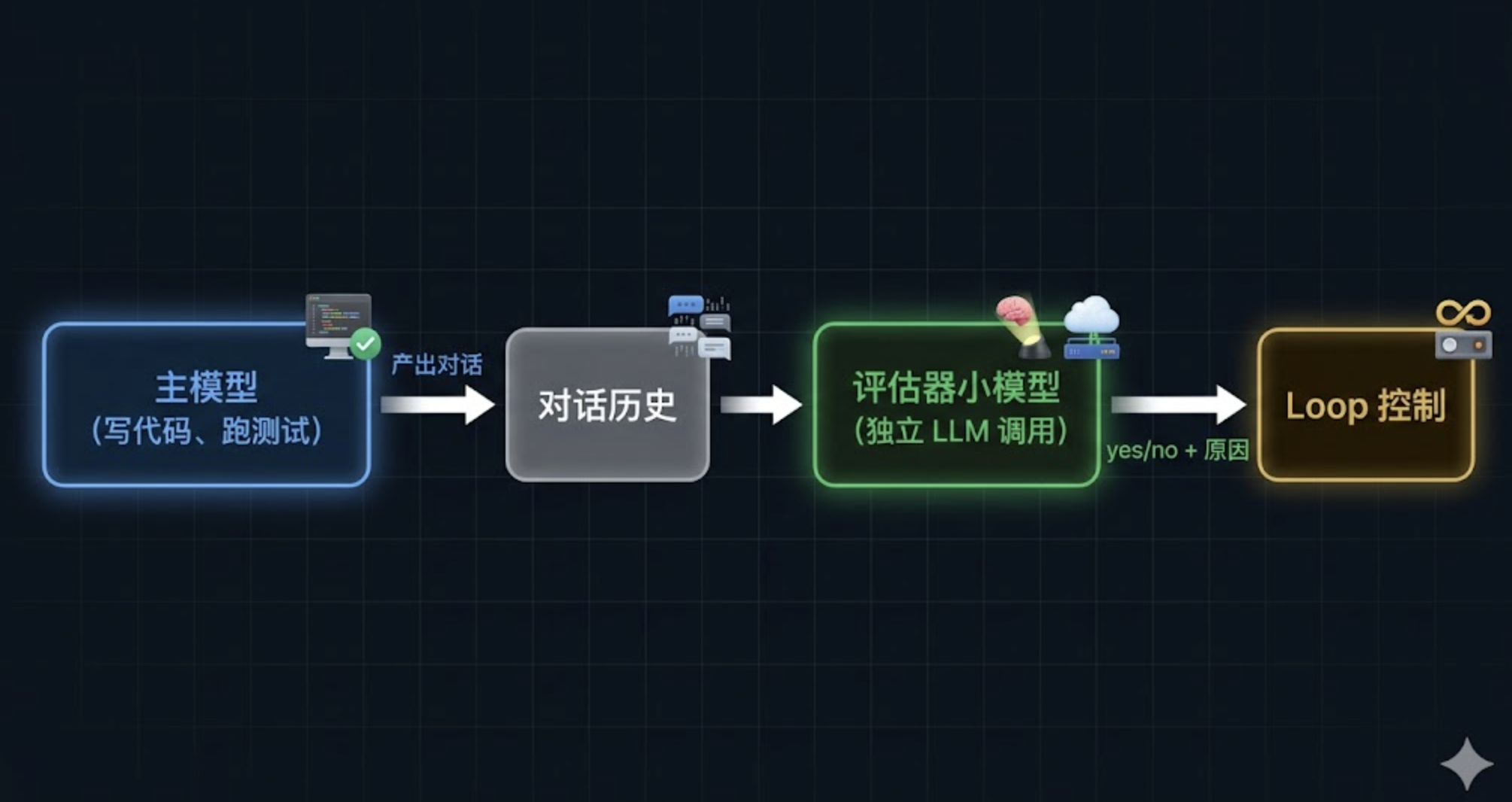
evo-agent 的方案是把评估这件事交给一个独立的小模型。
graph LR
A["主模型\n(写代码、跑测试)"] -->|"产出对话"| B["对话历史"]
B --> C["评估器小模型\n(独立 LLM 调用)"]
C -->|"yes/no + 原因"| D["Loop 控制"]
style A fill:#0d2137,color:#58a6ff
style C fill:#162118,color:#3fb950
style D fill:#2d1b00,color:#e3b341
评估器的输入是两段话——目标本身、最近 N 轮的对话摘要。它的输出是 Yes/No,以及理由 reason。
reason 限制在 30 词以内。这个限制不是为了省 token,而是逼评估器给出可读的判断依据。
如果它说”达成了”,理由必须具体——”测试输出中显示 X passing, 0 failing”。
如果说”没达成”,理由也要具体——”还有 3 个 unit test 失败”。
这条理由会被用作下一轮 LLM 的指导,告诉它”差什么”。
四、最后
从第八篇的内存 todo、第十四篇的磁盘 Session Plan,到这一篇的 /goal 完成条件——evo-agent 在三个不同尺度上回答了同一个问题:”Agent 怎么自己往前走?”
todo 解决”短任务里不迷路”——记住自己在做哪一步。
Session Plan 解决”长任务跨会话推进”——记住整个项目的骨架。
/goal 解决”轮次之间不掉链子”——记住自己应该跑到哪里才算完。
三层机制叠在一起,Agent 才真正从”对话助手”长成了”自主代理”。
graph TD
A["Agent 的'自主性'"] --> B["单轮内\nTool Use"]
A --> C["短任务内\nMemory Todo"]
A --> D["大任务内\nSession Plan"]
A --> E["跨轮次驱动\n/goal"]
B --> F["回答一个具体问题"]
C --> G["完成几分钟的小工作"]
D --> H["跨小时/天推进项目"]
E --> I["自己跑到目标达成"]
style E fill:#2d1b00,color:#e3b341
style I fill:#162118,color:#3fb950
《完》
-EOF-
本文公众号:天空的代码世界
个人微信号:tiankonguse
公众号 ID:tiankonguse-code
本文首发于公众号:天空的代码世界,微信号:tiankonguse
如果你想留言,可以在微信里面关注公众号进行留言。
