Agent 的任务规划:TODO 列表
作者: | 更新日期:
Agent 能调工具、能压缩记忆、能加载技能,但面对多步骤任务,它怎么知道自己做到哪了?这篇聊聊任务规划的原理,再看 evo-agent 的 todo 工具是怎么帮 Agent 建立一张始终在线的"作战地图"的。
本文首发于公众号:天空的代码世界,微信号:tiankonguse
前七篇文章分别讲了 Agent 的 Loop、Tools、记忆、Context Compact、MCP、Skill 和 TUI。
这篇聊一个常常被忽视、但非常关键的问题——任务规划。
一、Agent 的迷路问题
先说一个真实的场景。
你让 Agent 做一件稍微复杂点的事:帮我重构这个模块,要求加单测、更新文档、检查有没有循环依赖。
Agent 开始干活了。
它调了几个工具,读了几个文件,思考了一会儿,改了几行代码。
然后问题来了。
到了第五轮、第六轮循环,它已经不知道自己做到哪一步了。
有时候它会重复去读已经读过的文件。
有时候它会把已经完成的事情又做一遍。
有时候它干到一半,突然忘了”更新文档”这件事,直接跳到下一个话题去了。
这不是模型不够聪明,而是一个结构性问题:LLM 没有持久化的任务状态。
每一轮 Loop,它都是根据当前上下文重新推断”接下来该干什么”。
上下文一长,早期的任务目标就自然而然地被稀释了。
打个比方,这就像一个人拿了一张购物清单,但没有笔。
买了一样,用脑子记一下”这个买了”。
买到第七、第八样的时候,前面买没买过就开始混了。
需要的不是更强的记忆力,而是一支笔,把进度划出来。
这就是任务规划要解决的问题。
二、任务规划是什么
任务规划(Task Planning),在 AI 领域有很长的研究历史。
经典的规划系统,比如 STRIPS 和 PDDL,是这么工作的:
给定一个”初始状态”和一个”目标状态”,系统会自动搜索一条从初始到目标的动作序列。
就像棋盘上的走法推算——从当前局面出发,推算出几步之后能赢,把这条路径规划出来。

graph LR
A["初始状态\n(当前局面)"] -->|"规划器搜索"| B["动作序列\nA→B→C→D"]
B -->|"执行"| C["目标状态\n(任务完成)"]
style A fill:#1c2128,color:#8b949e
style B fill:#0d2137,color:#58a6ff
style C fill:#162118,color:#3fb950
这套经典方法有个致命问题:它假设世界是完全可预测的。
规划之前,你得把所有可能的动作、前提条件、效果全部定义清楚。
但真实的 Agent 任务不是这样的——工具可能报错、中间结果可能出乎意料、用户可能中途改需求。
现实世界是动态的,计划必须随时跟着变。
三、动态规划:边做边调
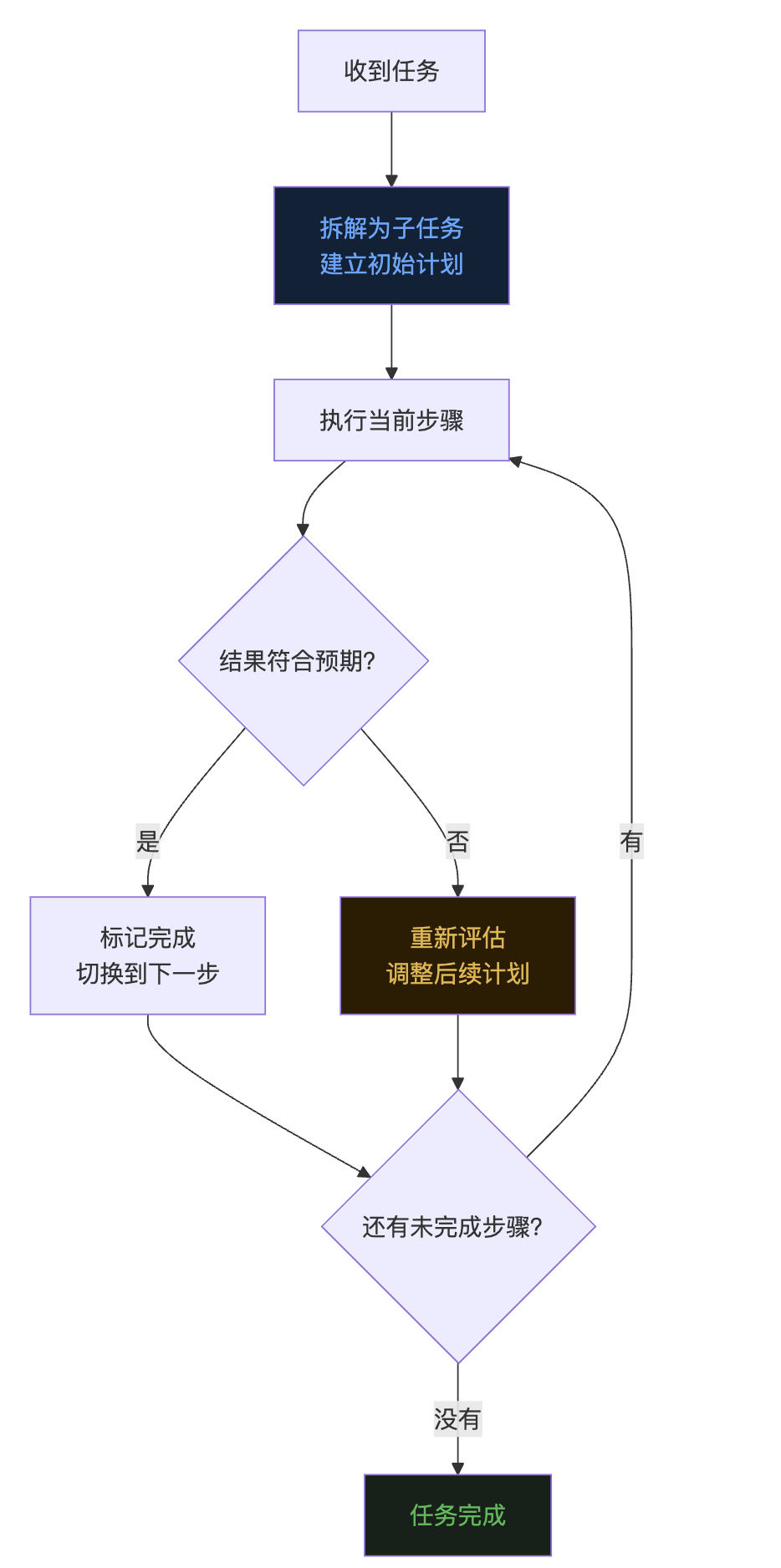
现代 Agent 更常用的思路叫动态规划,或者叫 Plan-then-Execute 的变体。
核心思想很简单:不要一次性把所有步骤全规划好,而是维护一张活的计划表,边做边更新。
graph TD
A["收到任务"] --> B["拆解为子任务\n建立初始计划"]
B --> C["执行当前步骤"]
C --> D{"结果符合预期?"}
D -->|"是"| E["标记完成\n切换到下一步"]
D -->|"否"| F["重新评估\n调整后续计划"]
E --> G{"还有未完成步骤?"}
F --> G
G -->|"有"| C
G -->|"没有"| H["任务完成"]
style B fill:#0d2137,color:#58a6ff
style F fill:#2d1b00,color:#e3b341
style H fill:#162118,color:#3fb950
这个模型有几个关键特征。
计划是实时可见的。
Agent 始终维护一张当前的任务列表,知道哪些做完了、哪些在进行、哪些还没开始。
计划是可修正的。
中途发现前面的判断有误,可以修改后续步骤,甚至删掉不必要的环节。
计划本身是上下文的一部分。
每次 LLM 思考”接下来干什么”的时候,它能看到这张计划表,不需要靠”记忆”来推断进度。
这最后一点是关键。
与其让 LLM 去记住”第三步已经做了”,不如直接把这个事实写下来,放在上下文里。
把状态外置,比让大脑记住状态,可靠得多。
四、再难一点:多层级任务
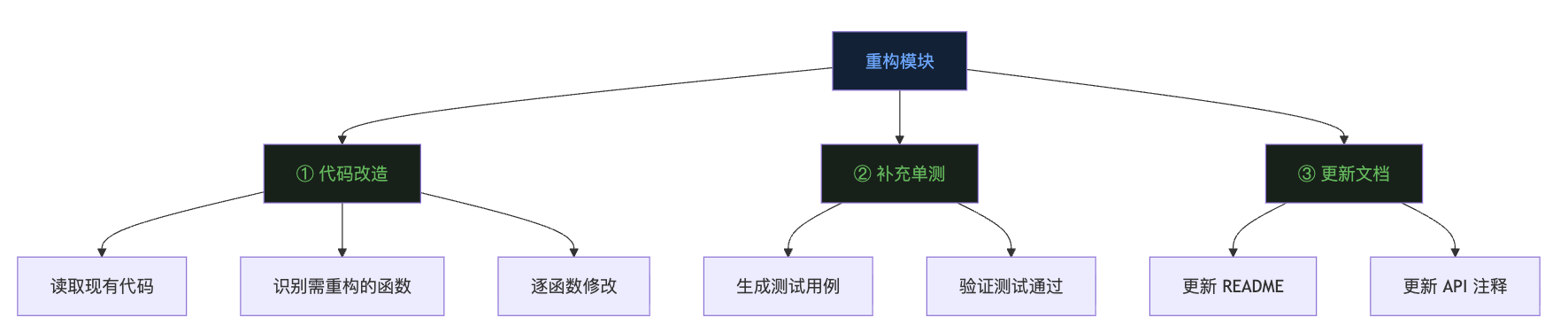
现实任务往往不是简单的线性清单,而是有层级的。
比如”重构这个模块”可能拆成三个大步骤,每个大步骤又有若干小步骤。
这就是 HTN(Hierarchical Task Network,层级任务网络) 的思想。
一个高层目标可以被分解成子目标,子目标再继续分解,直到每一步都是可以直接执行的原子操作为止。
graph TD
Root["重构模块"] --> A["① 代码改造"]
Root --> B["② 补充单测"]
Root --> C["③ 更新文档"]
A --> A1["读取现有代码"]
A --> A2["识别需重构的函数"]
A --> A3["逐函数修改"]
B --> B1["生成测试用例"]
B --> B2["验证测试通过"]
C --> C1["更新 README"]
C --> C2["更新 API 注释"]
style Root fill:#0d2137,color:#58a6ff
style A fill:#162118,color:#3fb950
style B fill:#162118,color:#3fb950
style C fill:#162118,color:#3fb950
但对于一个实际运行的 Agent 来说,全量的层级树维护起来太重了。
一个轻量的替代方案是:扁平化清单 + 按需拆解。
开始时只列出顶层任务,当进入某个任务时,再把它细化为更小的步骤,写进清单。
本质上还是 HTN 的思想,只是实现更轻,更适合在 LLM 的 token 预算里运转。
五、evo-agent 的 todo 工具
了解了原理,来看 evo-agent 是怎么落地的。
evo-agent 给 LLM 提供了一个内置工具叫 todo。
它的作用很直接——让 LLM 随时可以更新当前的会话计划。
每一条任务有三种状态:
pending → 还没开始
in_progress → 当前正在做
completed → 已经完成
状态转换是单向的,就像一条流水线:

graph LR
P["pending\n等待中"] -->|"开始执行"| I["in_progress\n进行中"]
I -->|"执行完毕"| C["completed\n已完成"]
style P fill:#1c2128,color:#8b949e
style I fill:#2d1b00,color:#e3b341
style C fill:#162118,color:#3fb950
计划表有两个硬约束。
第一,最多 12 条。
超过 12 条的计划不允许提交。
这不是技术限制,而是设计取舍——计划太长本身就是一个信号,说明任务边界没想清楚,需要先对齐目标再动手。
第二,同一时刻只允许一条 in_progress。
这是防止 Agent 同时”在做”很多事情,最后每件事都做了一半,没有一件真正做完。
这两个约束放在一起,强制 LLM 在任何时刻保持清晰的焦点:我现在在做哪件事,这件事完成了吗?
六、提醒机制:别忘了更新你的计划
有了 todo 工具,还有一个实际问题。
LLM 在执行过程中,可能一头扎进调工具、分析结果的循环里,连续好几轮都忘了更新计划。
计划停在原地不动,实际进展和计划状态就脱节了。
evo-agent 的解法是一个简单的提醒机制。
Agent 的 Loop 里会追踪:距上次使用 todo 工具,已经过了几轮?
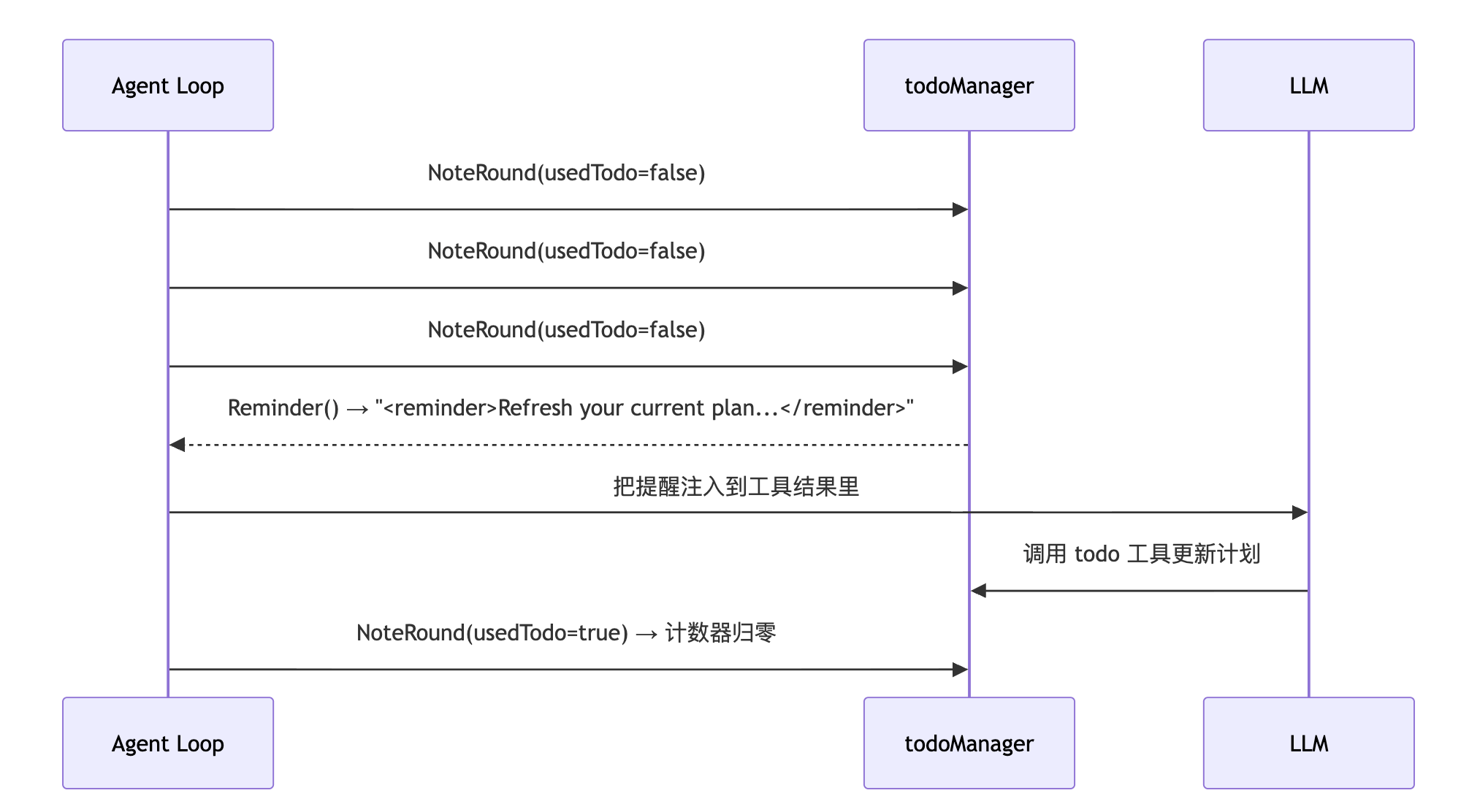
sequenceDiagram
participant AgentLoop as Agent Loop
participant Todo as todoManager
participant LLM as LLM
AgentLoop->>Todo: NoteRound(usedTodo=false)
AgentLoop->>Todo: NoteRound(usedTodo=false)
AgentLoop->>Todo: NoteRound(usedTodo=false)
Todo-->>AgentLoop: Reminder() → "<reminder>Refresh your current plan...</reminder>"
AgentLoop->>LLM: 把提醒注入到工具结果里
LLM->>Todo: 调用 todo 工具更新计划
AgentLoop->>Todo: NoteRound(usedTodo=true) → 计数器归零
连续三轮没有更新计划,就在下一轮的工具返回结果里注入一条提醒:
<reminder>Refresh your current plan before continuing.</reminder>
LLM 收到这条提醒,会重新审视当前计划,把已完成的步骤标记上,再继续推进。
这个机制不打断任何东西,不强制 LLM 做任何事,只是在合适的时机给它一个提示。
就像你在专注工作时,旁边贴着一张便签:“别忘了更新进度”。
七、TUI 里的计划面板
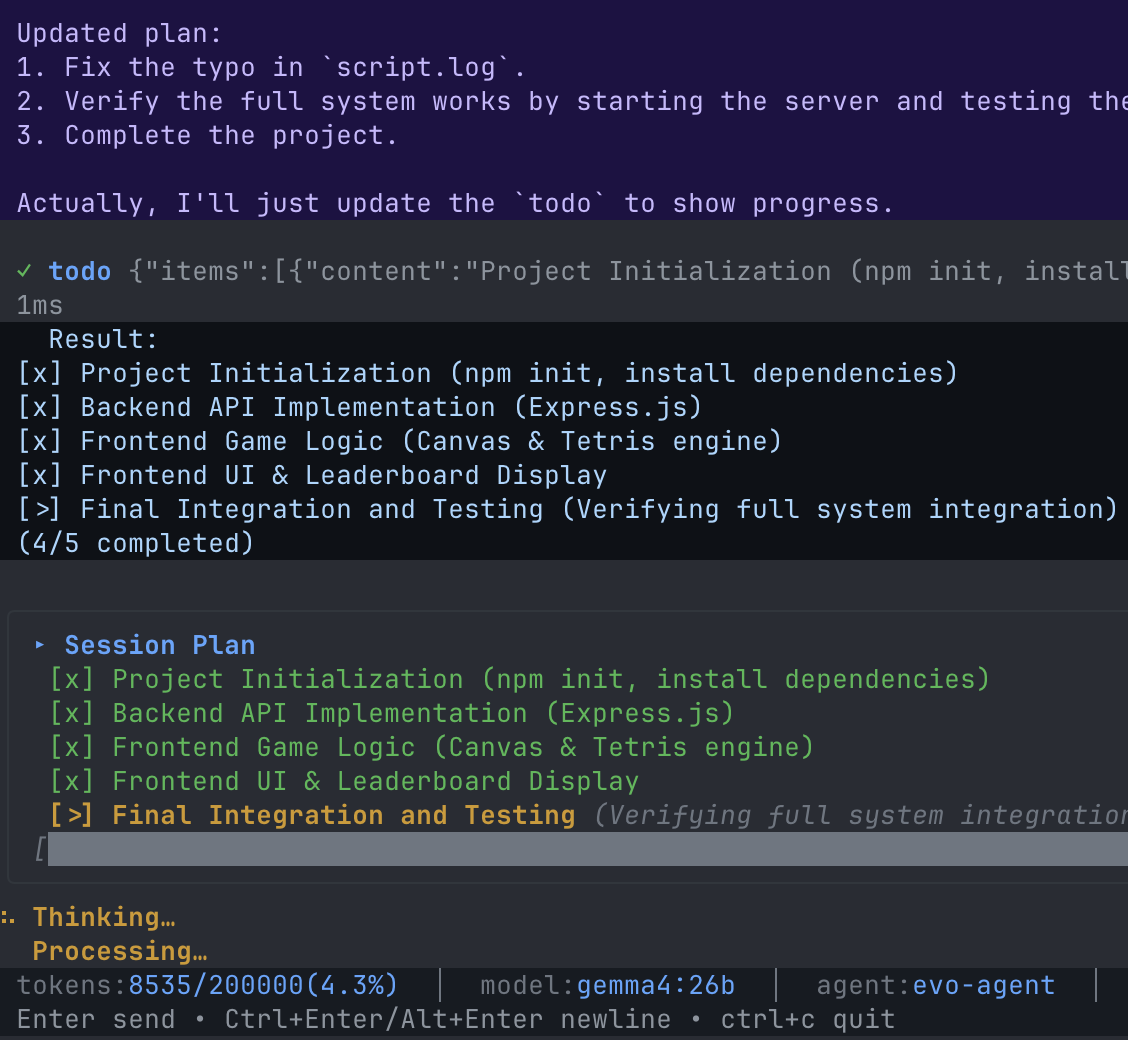
有了 todo 工具,计划的状态需要在界面上体现出来。
evo-agent 的 TUI 里有一个实时的计划面板,始终显示在屏幕底部。
每次 todo 工具被调用,Agent 会 emit 一个 EvTodo 事件,TUI 收到后立刻重绘这个面板:
[x] 读取现有模块代码
[>] 识别需重构的函数 (Analyzing functions)
[ ] 逐函数修改
[ ] 补充单测
[ ] 更新文档
(0/5 completed)
[ ] 是等待中,[>] 是当前在做,[x] 是完成了。
这个面板让使用者能实时看到 Agent 在任务里走到哪一步了,不用猜,不用翻历史记录。
配上 TUI 的永久区与实时区分层策略——每一条完成的任务会随着其他内容一起沉入滚动缓冲,面板只展示活跃状态——整体体感非常流畅。
八、为什么不直接让 LLM 自己追踪进度
你可能会问:LLM 这么聪明,为什么不直接让它自己在思考中维护进度,非要搞一个外置的工具?
原因有三点。
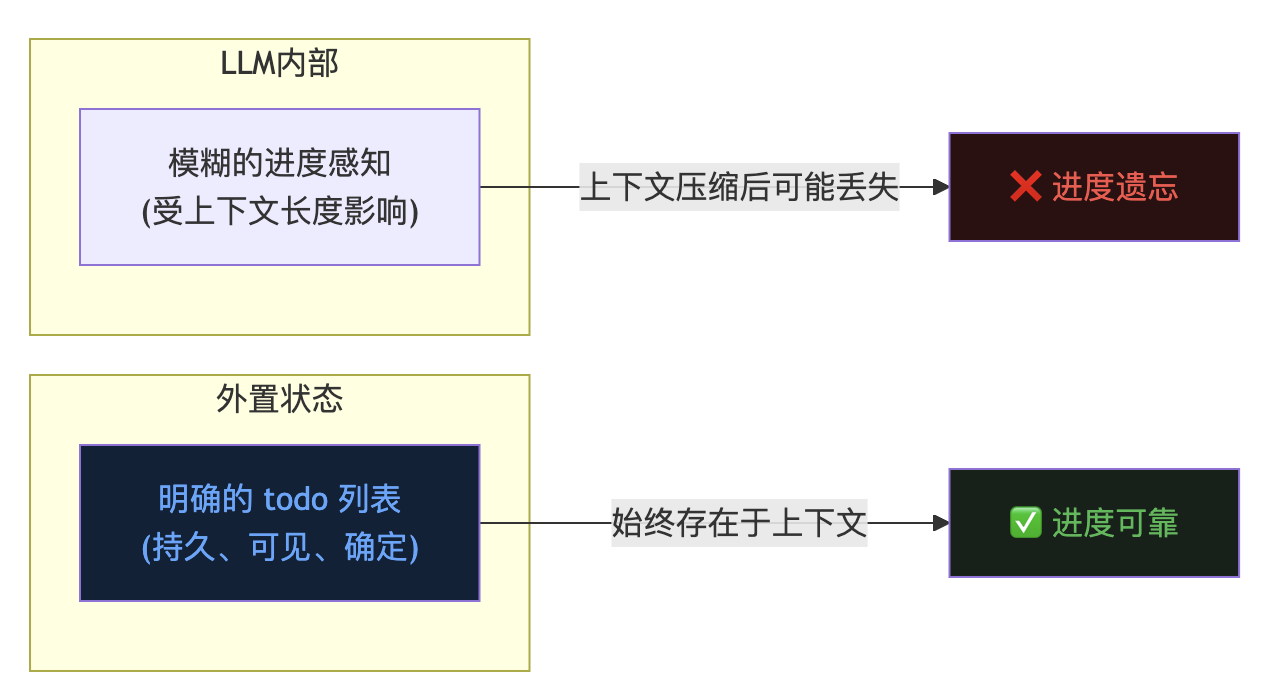
第一,上下文是有限的。
Context window 就那么大,随着任务推进,早期的目标会被稀释。
外置状态不占用 token 配额,始终都在。
第二,外置状态是确定的。
LLM 的”记忆”是概率推断,不是精确存储。
一个写进 todo 工具的 completed 状态,是确定的事实,不会因为上下文太长而”忘掉”。
第三,外置状态是可观测的。
调试 Agent 的时候,你能直接看到当前的任务列表,而不是去猜 LLM 的内部状态。
可见性直接影响可调试性。
graph LR
subgraph LLM内部
M["模糊的进度感知\n(受上下文长度影响)"]
end
subgraph 外置状态
T["明确的 todo 列表\n(持久、可见、确定)"]
end
M -->|"上下文压缩后可能丢失"| X["❌ 进度遗忘"]
T -->|"始终存在于上下文"| Y["✅ 进度可靠"]
style T fill:#0d2137,color:#58a6ff
style Y fill:#162118,color:#3fb950
style X fill:#2d1010,color:#f85149
把状态外置,这是 Agent 工程里一个反复出现的原则。
记忆要外置(上一篇 Context Compact 做的事),进度也要外置。
LLM 负责推理,状态交给系统来管。
最后
任务规划这件事,说复杂也复杂——学术界研究了几十年,STRIPS、HTN、各种规划算法。
说简单也简单——在 Agent 的实际工程里,一张结构化的待办清单,配上合理的状态约束和提醒机制,就能解决大多数问题。
evo-agent 的 todo 工具就是这个思路的轻量实现。
三个状态,两个约束,一个提醒。
但它背后解决的问题是真实的:让 Agent 在复杂的多步骤任务里,始终知道自己在哪、做到哪、下一步要去哪。
有了这张地图,Agent 才不会迷路。
《完》
-EOF-
本文公众号:天空的代码世界
个人微信号:tiankonguse
公众号ID:tiankonguse-code
本文首发于公众号:天空的代码世界,微信号:tiankonguse
如果你想留言,可以在微信里面关注公众号进行留言。
