历年 CSP-J/S 题型总结之状态最短路
作者: | 更新日期:
二分、线段树、动态规划、最短路
本文首发于公众号:天空的代码世界,微信号:tiankonguse
零、背景
CSP-J/S 是从 2019 年开始举办的。
之前已经在《近 6 年 CSP-J 算法题型分析》和《历年 CSP-S 算法题型分析》两篇文章里总结了 CSP-J 和 CSP-S 的题型。
接下来我的规划分两部分:
第一部分:介绍常见算法如何实现,以及在历年真题中是如何应用的。
第二部分:介绍面对比赛时,使用什么样的策略,才能尽可能拿到更高的分数。
第一部分的第一篇文章是二分,之前已经在《CSP-J/S 题型总结之二分》分享过了。
第一部分的第二篇文章是线段树,之前已经在《CSP-J/S 题型总结之线段树》分享过了。
第二部分的第一篇文章是得分技巧,之前已经在《CSP-J/S 备赛:5 个实用方法拿更多的分》分享过了。
第二部分的第二篇文章是环境准备,之前已经在《CSP-J/S 备赛必学之环境准备》分享过了。
这篇文章属于第一部分第三篇,打算介绍一下出现频率很高的状态最短路。

一、算法介绍
CSP-J(入门级)对最短路算法的要求相对宽松,掌握图的基本概念(如节点、边、权重)、图的存储方式(邻接矩阵、邻接表)、以及无权图的最短路(广度优先搜索,BFS)通常就能覆盖大部分考点。
CSP-S(提高级)则建议熟练实现 Dijkstra(推荐堆优化版)、SPFA、Floyd,并理解负权图的处理要点;“次短路”了解概念即可。
如今 STL 已是基础库,不需要自己手写堆了。
所以强烈建议熟练掌握 Dijkstra 的堆优化写法。
因为“状态最短路”通常就是在 Dijkstra 基础上叠一维(或多维)状态,并用堆优化来实现。
二、图的存储
实际比赛中,我们几乎所有的图都是使用邻接表来存储的。
如果是无权图,邻接的就是顶点列表。
vector<vector<int>> g(n);
while (m--) {
int u, v;
scanf("%d%d", &u, &v);
g[u].push_back(v);
g[v].push_back(u);
}
如果是有权图,则邻接的是二元组。
using ll = long long;
vector<vector<pair<ll, int>>> g(n);
while (m--) {
int u, v;
ll w;
scanf("%d%d%lld", &u, &v, &w);
g[u].push_back({w, v});
g[v].push_back({w, u});
}
三、朴素最短路
如果是无边权的最短路,直接使用队列 BFS 即可。
// 求 0 的单源最短路
vector<int> dis(n, -1);
queue<pair<int, int>> que;
auto Add = [&](int v, int step) {
if (dis[v] != -1) return;
dis[v] = step;
que.push({v, step});
};
Add(0, 0);
while (!que.empty()) {
const auto [u, step] = que.front();
que.pop();
const int nextStep = step + 1;
for (auto v : g[u]) {
Add(v, nextStep);
}
}
如果是带边权的最短路,就用优先队列堆优化的 Dijkstra。
using ll = long long;
template <class T>
using min_queue = priority_queue<T, vector<T>, greater<T>>;
// 求 0 的单源最短路
const ll INF = (1LL << 62);
vector<ll> dis(n, INF);
min_queue<pair<ll, int>> que;
auto Add = [&](int v, ll step) {
if (dis[v] <= step) return;
dis[v] = step;
que.push({step, v});
};
Add(0, 0);
while (!que.empty()) {
const auto [uw, u] = que.top();
que.pop();
if (uw != dis[u]) continue; // 跳过过期状态
for (auto [vw, v] : g[u]) {
Add(v, uw + vw);
}
}
四、状态最短路
状态最短路的思路与动态规划相似:把“节点 × 状态”视作扩展图上的新节点,在这张“扩展图”上跑最短路。
朴素的最短路只需要一个一维数组 dis[v] 表示从源点到 v 的最短距离。
状态最短路则是二维甚至多维数组,例如 dis[state][v] 表示“当 v 处于某个状态 state 时”的最短距离。
例如 2019 J 组 D 题《加工零件》,状态是按步数奇偶划分;
2023 J 组 D 题《旅游巴士》,状态是按模 k 划分。
这两道题的状态都是最短路取模上一个值代表状态,比较容易理解,大家可以用来参考学习。
“加工零件”没有边权,所以直接用队列 BFS 即可。
// 求 0 的单源最短路
vector<vector<int>> dis(2, vector<int>(n, -1)); // 2 个状态:偶/奇
queue<pair<int, int>> que; // {state, node}
auto Add = [&](int v, int state, int step) {
if (dis[state][v] != -1) return;
dis[state][v] = step;
que.push({state, v});
};
Add(0, 0, 0);
while (!que.empty()) {
const auto [state, u] = que.front();
que.pop();
const int nextStep = dis[state][u] + 1;
const int nextState = (state + 1) % 2; // 每走一条边,奇偶翻转
for (auto v : g[u]) {
Add(v, nextState, nextStep);
}
}
“旅游巴士”是带权图上的状态最短路。
// K 状态的 Dijkstra(以“距离模 K”为例,按题意也可改为“步数模 K”)
using ll = long long;
template <class T>
using min_queue = priority_queue<T, vector<T>, greater<T>>;
const int K = /* 例如 2,或题目给定的 k */ 2;
const ll INF = (1LL << 62);
// dis[s][v]:到达节点 v 且状态为 s 的最短距离
vector<vector<ll>> dis(K, vector<ll>(n, INF));
// 最小堆里放三元组 {距离d, 状态s, 节点u}
using Node = tuple<ll, int, int>;
min_queue<Node> pq;
auto push = [&](int s, int v, ll d) {
if (d < dis[s][v]) {
dis[s][v] = d;
pq.emplace(d, s, v);
}
};
push(0, 0, 0); // 从源点 0,初始状态 0 出发
while (!pq.empty()) {
auto [d, s, u] = pq.top();
pq.pop();
if (d != dis[s][u]) continue; // 过期
for (auto [w, v] : g[u]) {
ll nd = d + w;
// 若状态按“距离/时间”取模:
int ns = (int)(nd % K);
// 若状态按“步数(边数)”取模,请改为:int ns = (s + 1) % K;
push(ns, v, nd);
}
}
常见易错点:
- 距离与 INF 建议用 long long;不要填进
int导致整数越界。 - 堆弹出时要判“过期”(
if (d != dis[...]) continue;),否则会多做无效松弛。 - 状态转移要与题意一致:是按“步数”还是按“累计时间/距离”取模,或按边属性切换。
- 起点可能需要初始化多个状态(看题意,比如初始状态不唯一)。
- 终点答案可能是
min_s dis[s][t],别忘了在所有状态里取最小值。
五、最后
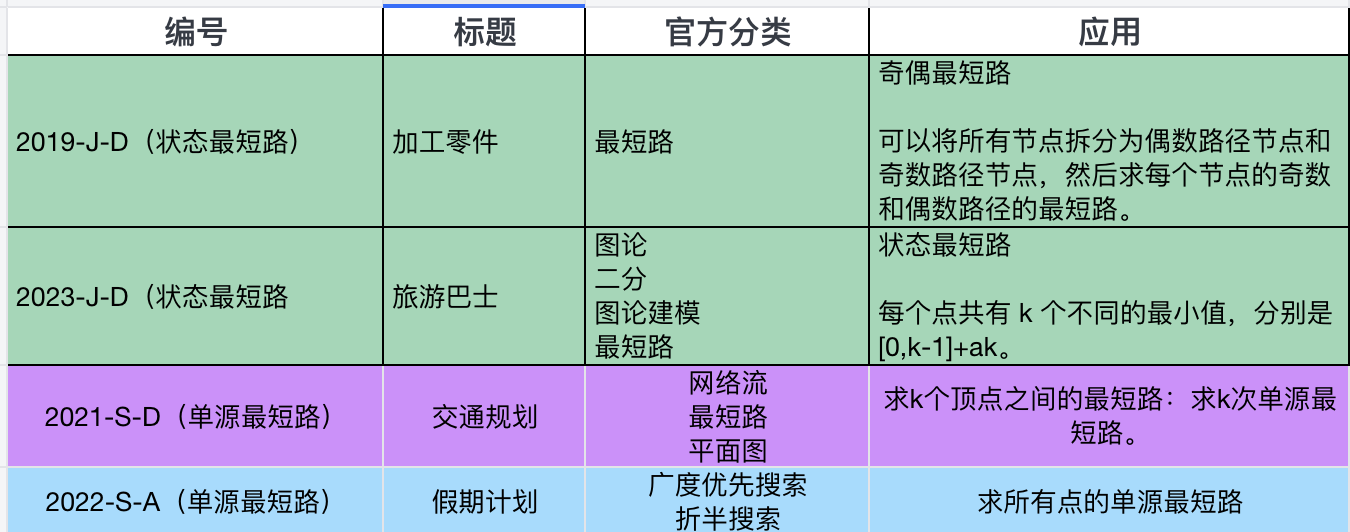
2019-J-D(状态最短路)和 2023-J-D(状态最短路) 一个状态为 2,一个状态为 K,本质上没有区别。
2021-S-D(单源最短路)和 2022-S-A(单源最短路) 就是朴素的最短路。
总的来说,CSP-J 也出现了两次“状态最短路”,CSP-S 更常把最短路作为综合题的一环;关键在于:
- 熟练 Dijkstra 的堆优化与“跳过过期”写法;
- 能根据题意正确“建图/建状态”,把问题转化为“扩展图上的最短路”。
《完》
-EOF-
本文公众号:天空的代码世界
个人微信号:tiankonguse
公众号 ID:tiankonguse-code
本文首发于公众号:天空的代码世界,微信号:tiankonguse
如果你想留言,可以在微信里面关注公众号进行留言。
